
In order to collect common consumer-scale litter items from the sea floor, a specialized gripper is required to account for the various types of objects that are found underwater. Accordingly, we have improved the initial prototype of the SeaClear gripper by adding key features that enhance the gripper’s durability, grasping capabilities, and adaptation to difficult litter items.
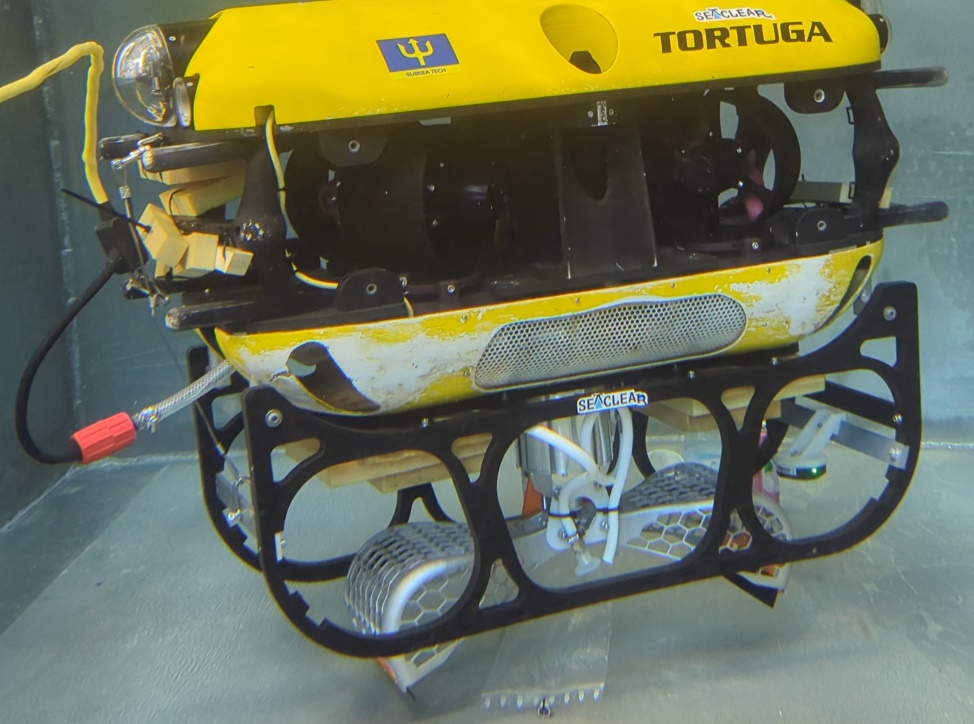
 The collection ROV with mounted gripper in the fully-open launch configuration
The collection ROV with mounted gripper in the fully-open launch configuration
One major challenge with the gripper design is achieving large opening angles to grasp bigger objects and while still allowing proper integration with the LARS from the SeaCat. With our newly developed mechanism, we can translate the gripper motor’s torque to a grasping force over the full opening range and are now able to robustly deal with a wide variety of litter items.
 Grasping of a drinking can in a lab tank
Grasping of a drinking can in a lab tank
A second addition to the original design is a suction device that can pick up structureless objects such as plastic bags. These items are challenging to grasp with regular grippers, therefore an alternative is necessary. A small pump is activated to create the suction force, and a second pump is used to release the collected items and blow litter into the collection basket.
 Grasping of a plastic bag in a lab tank
Grasping of a plastic bag in a lab tank
After promising grasping test in a controlled lab environment, the new gripper was deployed during the first public demonstration of the SeaClear system in Hamburg. There, we managed to successfully pick up a number of litter items, including bottles, cans, and plastic tubes. With this achievement, we are optimistically looking forward to the second public demonstration in Croatia later this year.
 Grasping of plastic bottle and metal can during public Hamburg demonstration
Grasping of plastic bottle and metal can during public Hamburg demonstration

This project has received funding from the European Union’s Horizon 2020 research and innovation programme under grant agreement No. 871295.
The SEACLEAR project spans four years, running from January 1st, 2020 to December 31st, 2023.