
After evaluating a first functional prototype, the SeaClear gripper goes into manufacturing to produce a rugged, waterproof version for our trials. This device is designed and implemented by our partners at TUM. This version is decidedly simple for robust operation under harsh conditions and will provide a baseline for comparing its efficiency to upgrades with suction capabilities and other advanced features.
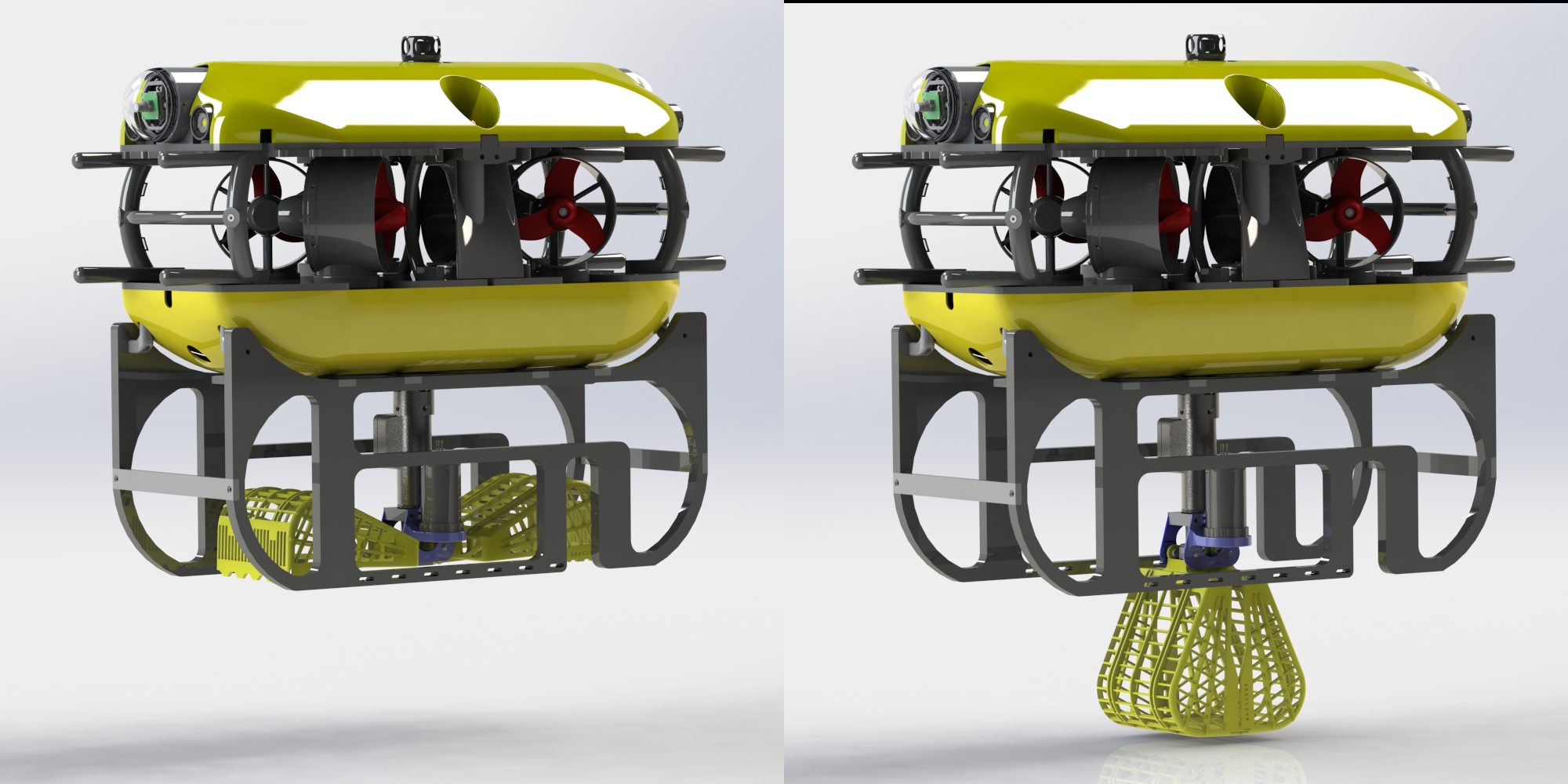
The gripper design diverts from claw setups (that are typically used) to an excavator style to ensure encaged transport of smaller items to the collection basket. Such a solution still allows versatile gripping options for partially buried and larger types of debris. Furthermore, the inadvertent enclosure of small marine lifeforms does not jeopardize their safety due to small grid-style openings on the gripper's scoops.

This design is being evaluated in its performance with the Collection Basket Prototype to ensure an optimal operation between these two components of the project.

This project has received funding from the European Union’s Horizon 2020 research and innovation programme under grant agreement No. 871295.
The SEACLEAR project spans four years, running from January 1st, 2020 to December 31st, 2023.